

 |
 |
 |
 |
 |
 |
|
|
|
|
  |
back to ResearchSELECTED PAST PROJECTS:
highly precise 3D optical scan and reconstruction system June 2007 –December 2008 This project is to realize a three dimensional scanner for extra large object surface reconstruction. The system features a structure light three dimensional scanner and a global positioning system. The three dimensional scanner is made up with a stereo vision sensor and a projector, and the global positioning system is a stereo vision sensor made up with two DSLR cameras. For a surface with length of 6 meters, the reconstruction precision can reach 0.3mm.
Research points in this project:
flight management system for Boeing B787 March 2009 – July 2009
simulation platform for Honeywell GCP field bus transfer protocol 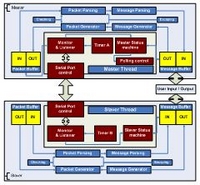 June 2008 – September 2008 June 2008 – September 2008GCP is a field bus protocol. The IntelliBus protocol (IB) forms the basis of the GCP protocol. GCP Protocol is also referred to as IB2, reflecting the enhancements to the protocol. GCP protocol is designed for Honeywel Building Solution products. GCP Protocol Tool is a diagnostic tool which has master and slaver function of GCP-P protocol. In this version of library, the functions mainly focus on GCP Link layer, GCP Transport Layer and GCP Application Layer.All layers of the GCP field bus protocol adhere to the OSI Communication model.The GCP Application Layer interface contains an object orientated message structure which has been designed to offer good flexibility and reuse. The chart below gives an idea of the relevative strengths of the protocol for use as an interface to devices and PC applications.
distributed flight simulation system September 2006 – June 2007 This project aims to develop a distributed flight simulation system for pilot training purpose. The simulation environment is based on VEGA, and the distributed networking platform is based on NI Datasocket technology and VEGA DIS system. With this simulation platform, pilots can join the flight simulation training in the same simulated environment through the rapid communication by only common LAN connection. For the purpose of pilot health monitoring, we designed a body parameter sensing equipment for the simulation system which can measure all kinds of body parameters of the pilot being trained, and transfer the data to the training system. Moreover, there is a central control system monitoring all the flight, position, and pilot health parameters, which is very useful for training excerises.
mobile experiment platform of automatic control theory September 2004 – June 2006 A mobile experiment platform with advanced and popular technologies is put forward. The hardware platform of the experiment system is based on Sunplus SPCE061A 16-bit micro controller and a Sunplus SPCP825a USB bus controller with in charge of the data transfer with computer while the data acquisition and signal generation is realized by 10bit analog-digital converter and digital-analog converter. The software platform is made up with a experiment system based on Microsoft .NET framework, a control system simulator and a virtual instrument system. As the remote control technology plays a more important role in control field, there is a integrated remote experiment system based on .NET Remoting technology. All of these made up a experiment platform which is Powerful, high expansibility and flexibility. It solve the problem of lack of resources in experiment teaching, and make ‘Dorm is Lab’ possible.

|

 Flight Management System is a fundamental part of a modern aircraft in that it controls the navigation. The flight management system (FMS) is the avionics that holds the flight plan, and allows the pilot to modify as required in flight. The FMS uses various sensors to determine the aircraft's position. Given the position and the flight plan, the FMS guides the aircraft along the flight plan. The FMS is normally controlled through a small screen and a keyboard. The FMS sends the flight plan for display on the EFIS, Navigation Display (ND) or MultiFuction Display (MFD).Honeywell leads the industry in Flight Management Technology. From developing both of the new and revolutionary Air Transport platforms of Boeing and Airbus to supporting the thousands of Honeywell FMS on more than a dozen aircraft types worldwide. The B787 Flight Management System is the center of a completely integrated cockpit and provides a new technology color LCD MCDU for pilot interaction. This system introduced advanced features such as digital cockpit communications, surveillance, and required time of arrival at an early industry stage and has continued to grow with the latest updates. Seamless interconnection with other avionics and systems provides very high fault detection integrity and enhances the useful life while increasing your feature benefits. The project aims to verify and validate the design of every component of the FMS.
Flight Management System is a fundamental part of a modern aircraft in that it controls the navigation. The flight management system (FMS) is the avionics that holds the flight plan, and allows the pilot to modify as required in flight. The FMS uses various sensors to determine the aircraft's position. Given the position and the flight plan, the FMS guides the aircraft along the flight plan. The FMS is normally controlled through a small screen and a keyboard. The FMS sends the flight plan for display on the EFIS, Navigation Display (ND) or MultiFuction Display (MFD).Honeywell leads the industry in Flight Management Technology. From developing both of the new and revolutionary Air Transport platforms of Boeing and Airbus to supporting the thousands of Honeywell FMS on more than a dozen aircraft types worldwide. The B787 Flight Management System is the center of a completely integrated cockpit and provides a new technology color LCD MCDU for pilot interaction. This system introduced advanced features such as digital cockpit communications, surveillance, and required time of arrival at an early industry stage and has continued to grow with the latest updates. Seamless interconnection with other avionics and systems provides very high fault detection integrity and enhances the useful life while increasing your feature benefits. The project aims to verify and validate the design of every component of the FMS.
Copyright © 2009-2015 Ziyan Wu All Rights Reserved